Вернуться к оглавлению книги 1.
Глава 6. ВД «Торнадо». Семейство магнитных двигателей
ПМ 220106.
Внимание! Изготовление любого двигателя из семейства «Торнадо», по крайней мере, в ближайшее время, вряд ли возможно в условиях домашней мастерской. В будущем, когда промышленность освоит выпуск магнитов необходимой номенклатуры (сложная геометрия), эта оговорка станет ненужной.
Магнитные двигатели «Торнадо» ПМ 220106 явились результатом решения главной проблемы возникающей при конструировании магнитных двигателей – проблемы устранения т.н. «коллапса». Т.е. проблемы беззатратного исключения или уменьшения сил противодействующего притягивания (отталкивания) магнитов в ключевых фазах работы двигателя.
Методов решения этой проблемы достаточно много. Но все они малоэффективны, или сомнительны, т.к. магнитное поле изучено на данный момент очень и очень слабо.
Попутно решалась задача исключения из конструкций любых перемещающихся возвратно-поступательно, деталей или узлов двигателя, как объектов ограничивающих абсолютно все характеристики разрабатываемых двигателей.
Конечной целью первоначального анализа и теоретических изысканий, была конкретизация условий, при которых становится возможным конструирование магнитных двигателей, в которых взаимодействие магнитов целиком и полностью происходит по круговым замкнутым траекториям.
Исходной посылкой для рассуждений послужил тот факт, что магнитный феномен базируется на двух почти взаимно исключающих обстоятельствах:
1. Физически и конструктивно любой магнит всегда имеет два полюса – северный «N»
и южный «S», а так же нейтральную(ые) область(и).
2. Технологически в магнитное поле встречного магнита можно внести только один полюс – северный или южный. Второй полюс при этом будет оставаться вне зоны взаимодействия, или в нейтральной области.
Эти обстоятельства вызывали закономерно напрашивающийся вывод: Раз в применении к магнитам есть понятия «чет»-«нечет» («плюс-минус» - «север-юг»), значит должна существовать ситуация когда можно одно скомпенсировать другим в нужный момент, или одно усилить другим, так же в нужный момент (алгебраическое сложение). При этом все замкнуть с конца на начало, т.е. организовать замкнутый цикл.
Первый, основополагающий вывод, полученный в результате анализа предлагаемых в Интернете конструкций: Магнитный двигатель должен быть как минимум двухконтурным. Конструкция первого (силового) контура должна обеспечивать возникновение мощного крутящего момента для дальнейшего его использования в нагрузке. Второй контур должен быть вспомогательным (компенсационным). Его конструкция должна быть целиком ориентирована на исключение паразитных, вызывающих «коллапс», сил, возникающих в силовом контуре.
Второй – немаловажный вывод – магнитные системы силового и компенсационного контуров (по крайней мере, на первых порах конструирования), не должны иметь общих зон взаимодействия магнитных полей, т.е. должны быть разнесены в пространстве или изолированы. Это даст возможность обеспечения более предсказуемых взаимодействий между магнитами.
Третий, вытекающий из второго, вывод – внутренние силовые взаимодействия между силовым и компенсационным контурами необходимо обеспечивать чисто механической связью, т.е., например, посадкой роторов силового и компенсационного контуров, с необходимым сдвигом фаз, на единую ось.
Следующим этапом конструирования закономерно стал синтез пространственных изолированных магнитных систем, механически взаимодействующих между собой, способных при этом генерировать дополнительный вращающий механический момент для использования в нагрузке.
На этом этапе выявилось несколько важных моментов:
1. Магнитные системы обоих контуров должны состоять из множества отдельных, специфичной формы, магнитов. Соответственно сделать магнитный двигатель на основе выпускающихся промышленностью магнитов, затруднительно, т.к. номенклатура их чрезвычайно бедна.
2. Отдельные магниты должны иметь удлиненную форму в направлении полюсов, или в некоторых случаях, в направлении линии раздела полюсов.
3. То, что магнитное поле ослабевает, по крайней мере, пропорционально второй степени от расстояния в одних случаях является положительным свойством, в других – отрицательным.
4. Магнитные системы, состоящие из множества малых одинаковых магнитов, имеют ряд свойств, которые в обычных магнитах завуалированы настолько, что об их существовании мало кто подозревает. Например, оказывается, уже реализованы т.н. «магнитные экраны» (не те о которых мы знаем из школьного курса физики, основаные на вытеснении магнитного поля из металла – т.е. на изгибании магнитных силовых линий) - армированные плоскости, набранные из миниатюрных магнитов, которые действительно экранируют (ослабляют) магнитное поле, не вызывая (или почти не вызывая) силового взаимодействия с экранируемым полем. Это очень большой шаг вперед в познании магнитных взаимодействий. Вообще эта тема необъятна. Так, например, у меня есть основания предполагать, что исследования в этом направлении могут привести к созданию очень мощных линейных магнитных двигателей, не требующих для своей работы никакой энергии.
Итак, «Торнадо»…
Рассмотрение принципа действия системы магнитной конфигурации «Торнадо» и двигателей на ее основе начнем с наиболее показательной модели – «Двухсекторный двухконтурный магнитный компенсационный двигатель ПМ 220106-1» показанной на рис. 18, 19, 20, 21, 22 и 23.
Для быстрого и легкого понимания рассмотрим сначала работу силового и компенсационного контуров в раздельности.
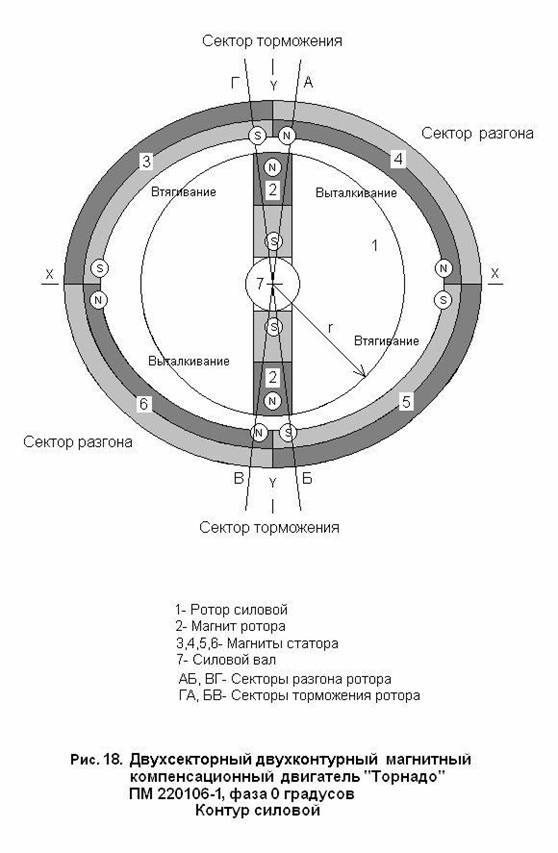
На рис. 18 изображен силовой контур. Он состоит из неподвижного статора набранного из эллипсных магнитных секторов с радиальной намагниченностью 3, 4, 5 и 6. Секторы 4 и 6 имеют северный полюс внутри, секторы 3 и 5 – снаружи.
Внутри статора находится немагнитный ротор 1 радиусом « r » с закрепленными на нем двумя полосовыми магнитами 2, обращенными северными полюсами к статору.
Исходное положение (фаза 0 градусов).
Начнем динамометром измерять силу, с которой нам необходимо удерживать или тянуть ротор при вращении его по часовой стрелке.
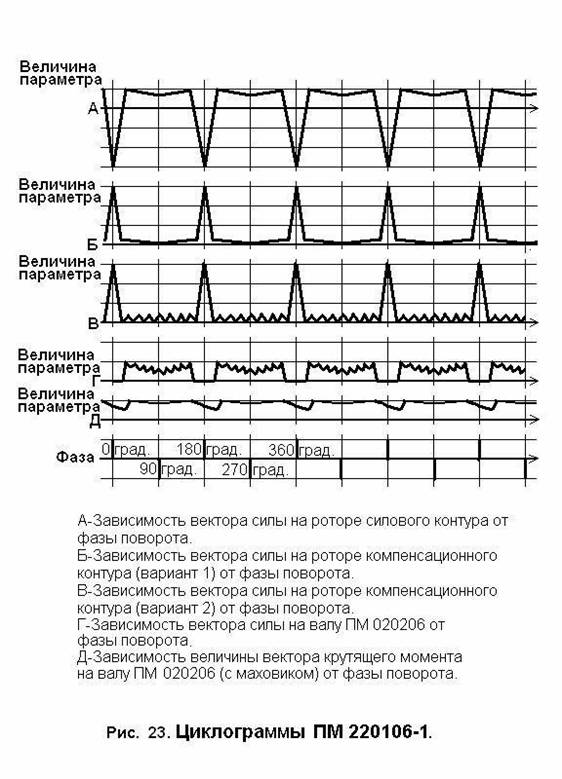
В фазе 0 градусов ротор находится в неустойчивом равновесии. Малейшее воздействие вызовет появление очень мощной силы (условимся, что это первоначальное микровоздействие направлено по часовой стрелке), которая стремительно вытолкнет оба магнита ротора (повернет ротор) в зону фазы 90 градусов. Здесь полюса магнитов статора изменяются, соответственно магниты ротора начнут втягиваться, т.е. ротор получит дополнительный вращающий момент. Где-то в последней трети-четверти полоборота магниты ротора начнут ощущать на себе отталкивающее действие магнитов статора находящихся далее по движению в другой половине его. Теперь нам необходимо приложить свою (внешнюю) силу для того, что бы привести ротор в аналогичное первоначальному, положение. Т.е. на этом участке траектории движения ротора магнитные взаимодействия будут противодействовать вращению (тормозить) и если внешняя сила окажется меньше силы противодействия, ротор войдет в состояние «коллапса», т.е. остановится. Но поскольку наша (внешняя) сила больше, мы доводим ротор в положение аналогичное первоначальному (фаза 0 градусов). Далее вся вышеописанная картина повторяется. Графически все эти перипетии показаны на рис. 23 график «А».
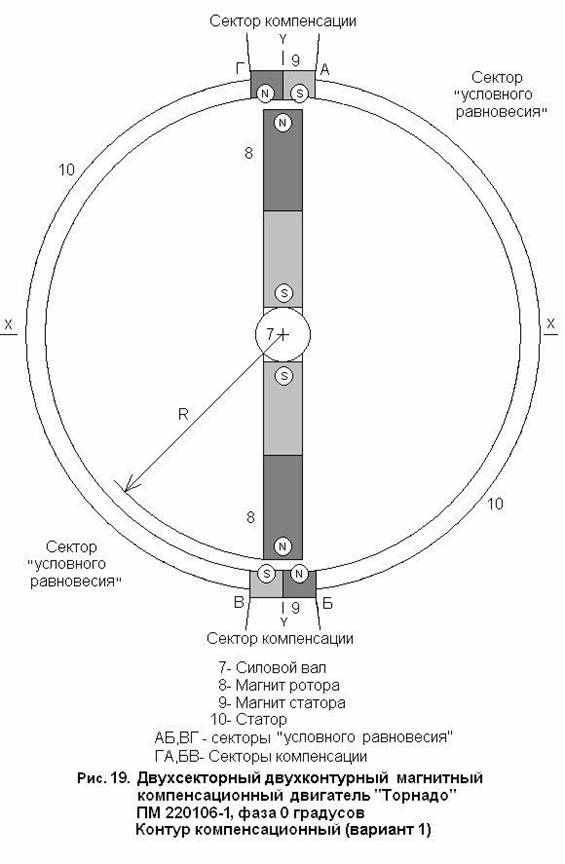
Компенсационный контур – вариант 1, изображенный на рис. 19 состоит из неподвижного немагнитного статора 10 на котором закреплены компенсационные магниты 9. Ротор состоит из двух полосовых магнитов 8 (немагнитное тело ротора не показано условно). Внешние торцы магнитов от оси удалены на расстояние « R ». Если теперь мы с помощью динамометра начнем делать измерения аналогичные вышеизложенным, то получим следующие результаты: В фазе 0 градусов ротор находится в положении неустойчивого равновесия. Как только мы его отпустим, он тут же стремительно выйдет в положение максимального взаимодействия притягивающихся разноименных полюсов магнитов, т.е. попадет в положение «коллапса». Далее ротор можно будет повернуть лишь воздействуя внешней силой. На этом этапе удерживающие силы будут противодействовать внешней силе. Далее по мере поворота ротора эта сила резко уменьшится и далее до фазы 90 градусов будет уменьшаться по квадратичному закону. После этого начнет так же по параболе увеличиваться и, в конце концов, при приближении к положению аналогичному первоначальному эта сила увеличится до максимального своего значения. После этого картина повторится. Графически поведение силы противодействия показано на рис. 23, график «Б». Как видно – поведение кривой далеко от идеала.
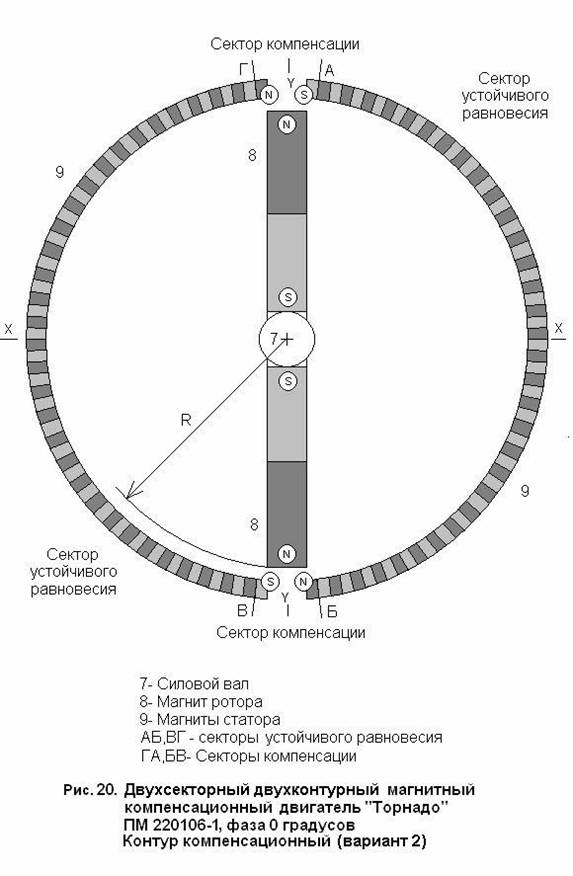
Лучше картина при использовании «виртуальных магнитов» статора (см. рис. 20. Контур компенсационный – вариант 2). Но и эта конструктивная схема имеет недостаток – обширные сектора устойчивого равновесия. В этих секторах магниты статора оказывают определенное импульсное противодействие вращению ротора. Положительно то, что эти импульсы попарно разнонаправлены и суммарное их противодействие, при условии, что внешний вращающий момент много больше, может быть на практике сведено к нулю (!).
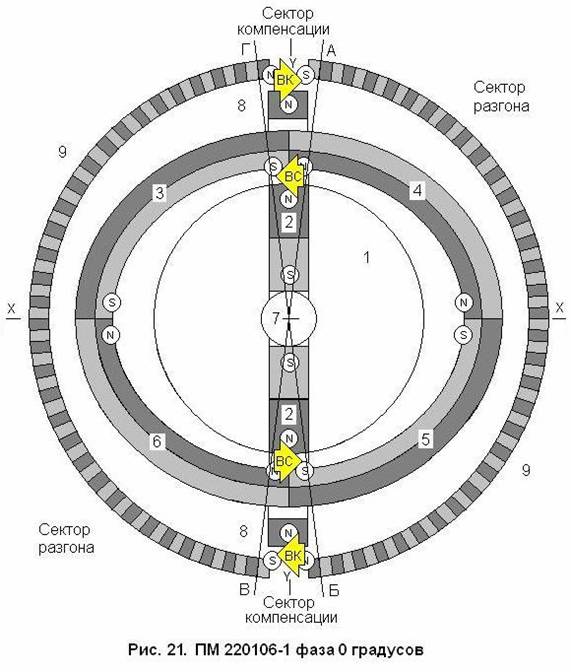
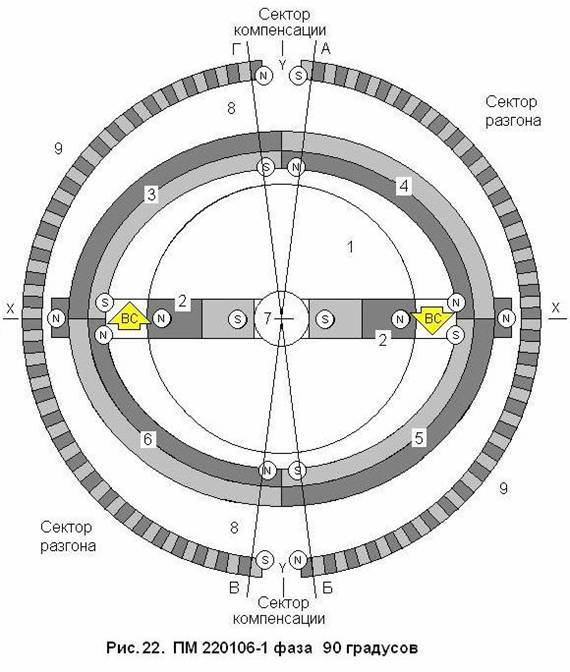
Совместную согласованную работу силового и компенсационного контуров (ПМ 220106 «в сборе») рассмотрим по рис. 21 и 22.
Сразу сделаем оговорку – роторы силового и компенсационного контуров вместе достаточно массивны и имеют инерционность маховика, или на силовой вал двигателя дополнительно насажен массивный маховик. Он необходим для преодоления нескомпенсированных сил противодействия и придания плавности вращению ротора.
В исходном положении (фаза 0 градусов) ротор двигателя находится в неустойчивом равновесии: магниты ротора силового контура испытывают на себе притягивающее действие магнитов статора, находящихся в направлении против часовой стрелки и отталкивающее действие магнитов статора, находящихся в направлении по часовой стрелке. Общий вектор силы ВС направлен против часовой стрелки.
В противоположность ему магниты ротора компенсационного контура испытывают притягивающее действие магнитов своего статора расположенных в направлении по часовой стрелке и отталкивающее действие магнитов расположенных в направлении против часовой стрелки. Общий вектор компенсационной силы ВК направлен по часовой стрелке. Численно векторы ВС и ВК равны. При этом они разнонаправлены. Т.е. компенсируют усилия друг друга, и соответственно ротор двигателя (он же – система ротор силового контура + ротор компенсационного контура) находится в безразличном равновесии. Это равновесие соблюдается в пределах сектора компенсации. Но если теперь внешней (очень малой!) силой довернуть его по часовой стрелке в начало сектора разгона, он, будучи подхвачен магнитным полем статора силового контура (в этом секторе ротор компенсационного контура взаимодействует со своим статором очень слабо, т.е. практически не противодействует). По мере дальнейшего поворота ротора силового контура, он запасает энергию вращения сначала за счет выталкивающего действия взаимодействующих однополюсных магнитов, затем, после преодоления положения «фаза 90 градусов», за счет втягивающего действия разнополюсных магнитов. Накопив, таким образом, достаточную механическую энергию в маховике, ротор по инерции проскакивает сектор компенсации. Далее картина повторяется каждые 180 градусов.
Особое замечание: Величины радиусов « r » и « R » позволяют добиться идеального баланса сил между силовым и компенсационным контурами. Они могут отличаться друг от друга существенно (в разы). Это позволяет использовать в компенсационном контуре вместо «редкоземельников» относительно недорогие широкораспространенные магниты.
На рис. 23 приведены циклограммы. Комментировать их не имеет смысла, т.к. они иллюстрируют вышеизложенное.
На рис. 31. в очень упрощенном виде приведен предпочтительный вид магнитного поля ротора. Поле должно иметь выраженную зубчатую форму. Только при этом эффективность преобразования силового взаимодействия ротора со статором в тангенциальную составляющую, действующую на ротор, будет максимальна. Это требование накладывает ограничения на количество магнитов установленных на роторе(ах).
Система «Торнадо» позволяет конструировать самые различные, практичные магнитные двигатели пригодные во всех сферах жизни. Перспективы здесь необозримы. Хочется верить, что внедрение их в жизнь будет происходить аккуратно и осторожно. Иначе перспектив у цивилизации останется еще меньше… на порядки!
Ниже на рисунках 24, 25, 26, 27, 28, 29, 30 приведены схемы и изометрия возможных различных конструкций двигателей «Торнадо». Все двигатели двухконтурные. Местоположение магнитов компенсационных контуров показано схематично. У каждого из двигателей свои достоинства и недостатки. Думаю, что человеку, прочитавшему всю книгу, нетрудно будет разобраться. Так что комментарии опускаю.
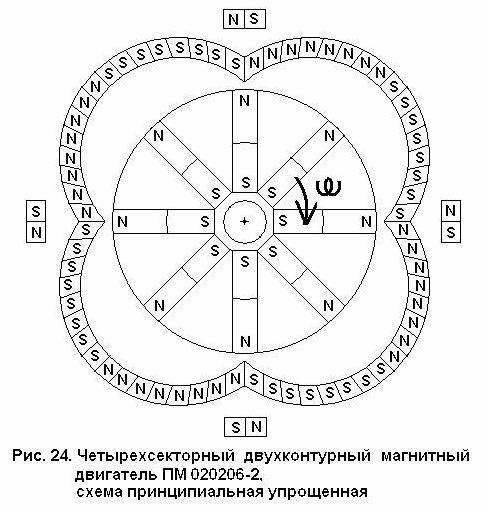
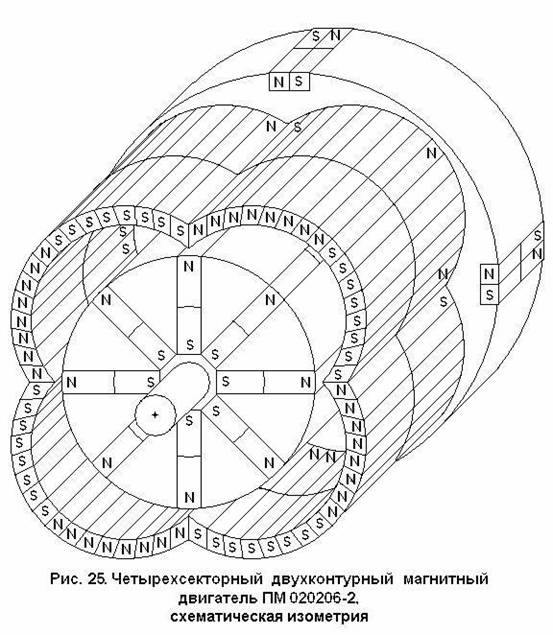
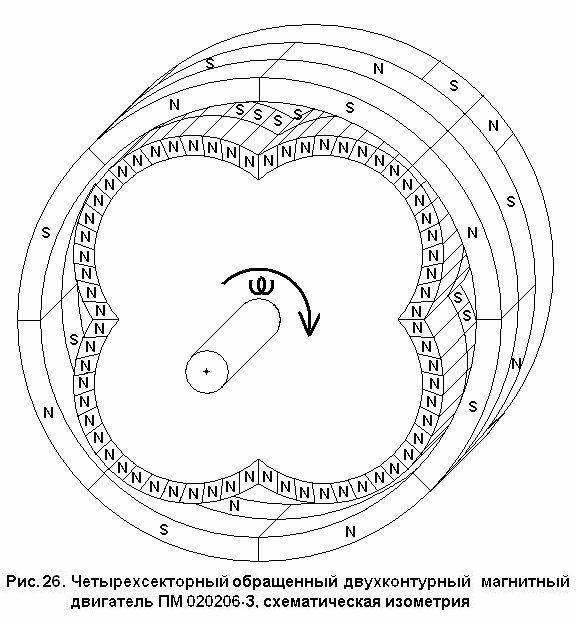
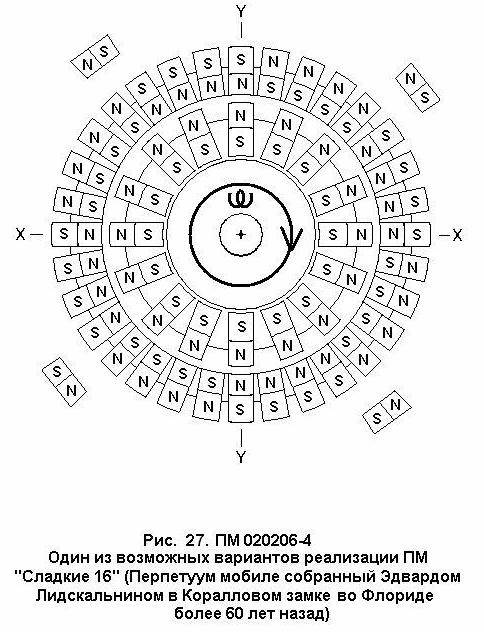
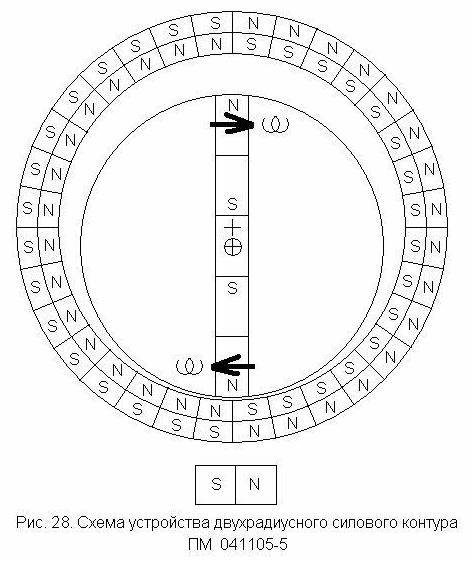
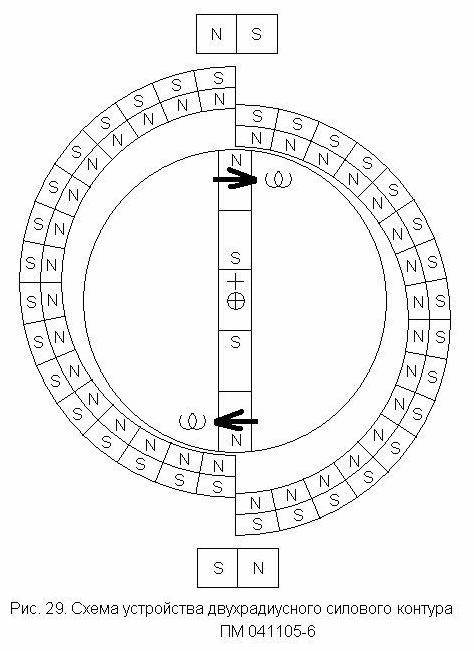
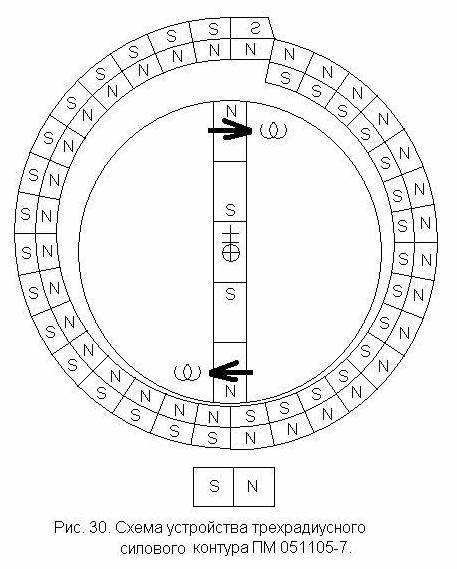
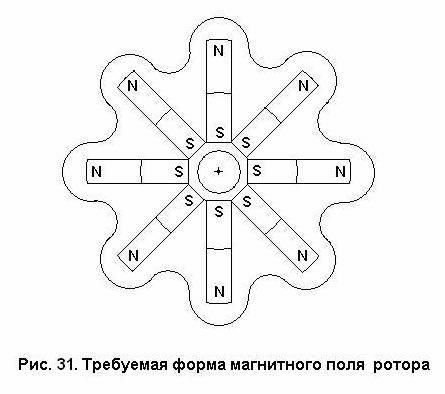

Рис. 32 (фото) взят из интернетовского сайта «Welcome to Labyrinthina», в котором изложена интригующая история построения кораллового замка таинственным латвийцем Эдвардом Лидскальнином. Более 60 лет назад он сделал магнитный ВД, и по видимому, использовал его при строительстве. Сохранился только ротор ВД. Как был устроен статор и вспомогательные узлы – загадка.
На рис. 27 я предлагаю один из возможных вариантов их устройства.
PS. Следует иметь в виду, что сделать очень хорошую компенсацию в магнитных ВД затруднительно, но реально.
Можно менять рекомендуемый нулевой фазовый сдвиг между силовым и компенсационным контурами вплоть до десятков градусов.
Можно устанавливать магниты компенсационных контуров под углом к касательной ротора.
В компенсационных контурах можно устанавливать блоки из нескольких магнитов разной силы.
Для магнитной развязки контуров можно применять магнитные экраны.
Для придания необходимых свойств и конфигурации магнитных полей в соответствующих местах, можно применять магнитопроводы (в них поле затухает линейно от расстояния).
Для умощнения ВД можно компоновать силовые и компенсационные контуры пакетами параллельных магнитных систем.
Вернуться к оглавлению книги 1.