Вернуться к оглавлению книги 1.
Глава 5. ВД «Многофазный гидростатический мотор» (ПМ 160804).
Третья конструкция ВД (ПМ 160804) разрабатывалась мною как, не имеющий ограничений по мощности, привод для использования в народном хозяйстве.
- Анализ существующих конструкций ВД (работающих и неработоспособных) показал, что в подавляющем большинстве случаев все они базируются на одном принципе – принципе «фазового (углового) смещения», будь то гравитационное, электрическое, магнитное, или еще какое-либо.
- Главная задача стоящая при разработке гравитационных (работающих от силы тяготения) ВД – сконструировать некое устройство, которое бы с помощью каких то энергетически малозатратных (или вообще беззатратных) перемещений, вызывало эффект механического дисбаланса, другими словами эффект «смещения». Причем это устройство должно быть, в широком смысле слова, инвариантным для самой гравитации. В идеале оно не должно зависеть от гравитационного поля (быть «ортогональным»). Например, как было изложено в главе III, можно сконструировать устройство смещения с использованием магнитного поля Земли (дебалансная магнитная стрелка). Однако ВД сконструированный на его основе будет настолько маломощным, что будет годен разве лишь что, для демонстрационных целей. Для практики же нужен ВД уровня мощности, привлекательного для энергетики.
- Собственная практика конструирования показала, что в чистом виде механическое, магнитное, гидравлическое или еще какое-либо устройство смещения, реализовать либо очень затруднительно, либо вообще невозможно.
- Анализ комплексов некоторых математических функций, их совместное поведение в приложении к некоторым механическим системам, показал, что существуют особые «зоны» (!) т.н. «Зоны дьявола» (термин автора), где использование свойств функций, свойств и геометрии элементов систем в равнораспределенных векторных силовых полях, могут дать очень и очень неожиданные результаты.
- Существование «Зон дьявола», в свою очередь дало возможность, опираясь на их свойства, конструировать мощные устройства смещения – «Модуляторы» (термин автора).
- При анализе гидростатических дебалансных устройств неожиданно проявился один своеобразный их класс – «Дебалансы с виртуальным грузом» ДВГ - (термин автора), отличительной особенностью которых является относительно слабая зависимость величины и направления дебалансности от направления вектора действия, силы создающей эту дебалансность.
Описание конструкции гидростатического дебаланса с виртуальным грузом – гидростатического модулятора – далее ГСМ.
ГСМ (см. рис. 12) представляет собой, находящийся на оси (со свободой вращению), герметичный корпус-ротор заполненный какой либо жидкостью (чем плотнее – тем лучше, идеальный вариант – ртуть). Внутри корпуса, на некотором удалении от оси вращения установлена другая ось, на которой находится Г- образный рычаг, со свободой вращению вокруг нее, в месте соединения длинного и короткого плеч рычага. К концу короткого плеча рычага прикреплена пустотелая прочная емкость заполненная газом или вакуумом. К длинному – массивный груз (стабилизатор, веса которого достаточно для удержания рычага в положении близком к вертикальному (точнее – когда длинное плечо рычага почти параллельно вертикали)). На противоположной к оси вращения рычага, стороне корпуса, закреплен неподвижно уравновешивающий балансир. Его вес и точка расположения таковы, что при отсутствии жидкости внутри ротора вся конструкция находится в безразличном равновесии.
При наличии жидкости внутри ротора, на элементы его конструкции начинают действовать силы, нарушающие его первичный баланс.
Так, пустотелая емкость, стремясь всплыть внутри ротора, отклонит длинное плечо рычага в сторону своего всплывания. Появится плечо силы для веса стабилизирующего груза. Физически это вызовет появление дебалансной составляющей стремящейся повернуть ротор так, что бы он занял положение, когда ось вращения рычага окажется в наиболее низкой точке. Это паразитная сила. Ее вызывает механическое взаимодействие элементов конструкции в гравитационном поле. В данной ситуации она стремится повернуть ротор против часовой стрелки.
Однако существует еще одна вращающая сила – встречно направленная. Это сила дебаланса жидкости внутри ротора. Ее создает зеркальный объем жидкости находящийся в позиции точно противоположной мгновенному местонахождению пустотелой емкости. Этот объем называется «виртуальным грузом» т.к. угловое его положение и удаление от оси вращения ротора (без каких либо механических элементов – чистая гидростатика), имеют только мгновенные величины, зависящие от углового положения ротора.
При определенных размерах короткого плеча рычага и удаления его оси вращения от оси вращения ротора (первый оптимум) соблюдаются следующие условия: Пустотелая емкость всегда находится левее или точно (в единственной точке) на линии вертикали проходящей через ось вращения ротора.
Виртуальный же груз (зеркальная производная пустотелой емкости) всегда находится правее или точно (в единственной точке) на линии вертикали проходящей через ось вращения ротора.
Поскольку пустотелая емкость находится внутри ротора, а ротор при отсутствии жидкости был уравновешен, то и в присутствии жидкости, стремление емкости всплыть само по себе никоим образом не сказывается на угловом положении ротора, т.к. это является чисто внутрисистемным взаимодействием элементов конструкции. Однако, через механические связи проекцией этого внутрисистемного взаимодействия на ротор, все же, будет наличие описанного выше паразитного крутящего момента.
Иное дело для виртуального груза. Тот объем ротора, который слева от оси вращения ротора вытеснила пустотелая емкость, заполнен соответствующим объемом жидкости (в соответствующей – зеркальной позиции) в правой половине ротора. Как следствие - правая половина ротора будет тяжелее левой. Поскольку ротор является балансным объектом, на котором проявляется действие внешнего поля, в данном случае гравитационного, то он начнет под действием тяжести правой своей половины, поворачиваться по часовой стрелке до тех пор, пока позиционно виртуальный груз и пустотелая емкость не окажутся в верхних точках своих траекторий движения. Это верхние, так называемые точки равновесия пустотелой емкости и виртуального груза.
Дальнейший активный поворот ротора невозможен. Зато он не будет оказывать никакого сопротивления внешнему поворачивающему воздействию, т.к. в оставшемся возможном секторе поворота до нижних равновесных точек, ротор будет уравновешенным объектом. Нетрудно заметить, что между верхними и нижними точками траекторий движения пустотелой емкости и виртуального груза ровно по 180 градусов.
Таким образом, конструкция ГСМ обладает тремя замечательными свойствами:
1. В активном секторе поворота (от 180 до 360 градусов сектора движения пустотелой емкости) ротор создает мощный крутящий момент.
2. В пассивном секторе поворота (от 0 до 180 градусов сектора движения пустотелой емкости) ротор ведет себя как уравновешенный объект, практически не оказывая сопротивления внешнему поворачивающему воздействию.
3. Нижние равновесные точки – точки неустойчивого однонаправленного равновесия. Оказавшись в этом положении, ротор самопроизвольно переходит в фазу вращения в активном секторе.
Примечания:
1. Направление движения пустотелой емкости по своей траектории внутри ротора совпадает с направлением вращения самого ротора. Направление мнимого движения виртуального груза зеркально относительно вертикали по отношению к движению пустотелой емкости, т.е. встречно направлению вращения ротора.
2. Вращаясь, ротор ГСМ выдает крутящий момент, меняющийся по закону прореженной через пик эпициклоиды (1 пик на 1 оборот).
Точнее: Расчет показывает, что крутящий момент изменяется по синусоиде смещенной по вертикали относительно временной оси.
На рис. 13 показан облегченный вариант ГСМ. В нем в качестве стабилизатора используется система шток/шатун (8)-подшипник скольжения (9). Такая конструкция обладает гораздо лучшими массогабаритными параметрами.
На рисунке 14 показаны циклограммы для разных конструкций ПМ 160804:
Примечание: При анализе учитывайте, что вместо эпициклоид на циклограммах присутствуют синусоиды.
1. А – Циклограмма крутящего момента одиночного ГСМ.
Видно, что в секторе 180-360 градусов ГСМ создает крутящий момент.
В секторе 0-180 градусов ведет себя пассивно.
2. Б – Совмещенные циклограммы двухфазного ПМ 160804.
В секторе 0-180 градусов крутящий момент создает ГСМ2, в секторе
180-360 градусов ГСМ1. Четко выраженный импульсный характер суммарного крутящего момента.
3. В – Совмещенные циклограммы четырехфазного ПМ 160804.
В обоих секторах в любой момент 2 ГСМ создают постоянно присутствующий крутящий момент. Слабо выраженный импульсный характер суммарного крутящего момента.
4. Г – Совмещенные циклограммы восьмифазного ПМ 160804.
В обоих секторах в любой момент 4 ГСМ создают постоянно присутствующий крутящий момент. Очень слабо выражена импульсная составляющая.
Понятно, что с увеличением количества ГСМ улучшаются характеристики ПМ 160804.
В принципе ГСМ может быть любое количество. Даже 1 – при условии использования массивного ГСМ или дополнительного маховика. Но лучше если их количество будет кратным 4.
Сами ГСМ могут быть размещены на станине любой конфигурации (круглой, прямоугольной, треугольной и пр.). Главное, что бы они были связаны между собой с необходимым сдвигом фаз, какой либо удобной трансмиссией, в единую силовую установку.
Рис. 14. Циклограммы ГСМ и ПМ 160804.
Установив несколько ГСМ (минимум – 1, максимум – без ограничений) на единой станине и связав их механическими передачами, с соответствующим сдвигом фаз (360/Н градусов)
получим Н-фазный ВД ПМ 160804 (Н – количество ГСМ).
В качестве примера на рис. 15 показан восьмифазный ВД ПМ 160804.
Такой ВД, конечно еще не идеал – стационарен, массивен, габаритен…но… имеет целый ряд существенных достоинств:
1. В зависимости от размеров конструкции способен вырабатывать уровень мощности необходимый для любого практического применения.
2. Имеет простую конструкцию, делающую возможным изготовление ВД даже в условиях домашней мастерской.
3. Для изготовления ВД не требуется каких либо дефицитных материалов или экзотических технологий.
4. ВД экологически чист.
5. ВД перспективен для дальнейших усовершенствований и модификаций с целью достижения массогабаритных параметров, удовлетворяющих требованиям к двигателям подвижных транспортных платформ, вплоть до автомобилей.
6. ВД работоспособен в любой точке поверхности и прилегающего ближнего пространства земного шара.
7. ВД вырабатывает побочный продукт – тепло.
В многофазном ПМ 160804 в зависимости от фазовых соотношений (чисто конструкционный параметр – произвол разработчика) между отдельными ГСМ, сектор активной работы ГСМ(ов) может перемещаться по часовой стрелке, против часовой стрелки или по определенному алгоритму. При этом направление вектора крутящего момента остается без изменения.

Ниже привожу часть схем семейства возможных конструкций ВД «Многофазный гидростатический мотор» ПМ 160804 (см. рис. 16 и 17) .
Рис. 16. Схема устройства ВД «Гидростатический мотор» ПМ 160804, вариант 2.
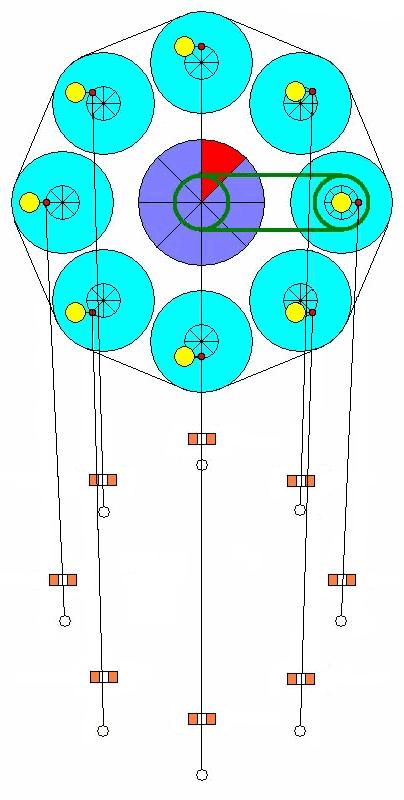
Рис. 17. Схема устройства ВД «Гидростатический мотор» ПМ 160804, вариант 3.
Вернуться к оглавлению книги 1.